
哈佛大学团队研制出的机械臂速度快得让人眼花
- 来源:AI星球
- 作者:NT
- 编辑:newtype2001
说到机械臂,给人的印象要么笨重且力大无比,要么追求精细操作但移动速度缓慢。现在由哈佛大学团队研制出的机械臂已经兼顾了速度与精度,刷新了人们的认知。
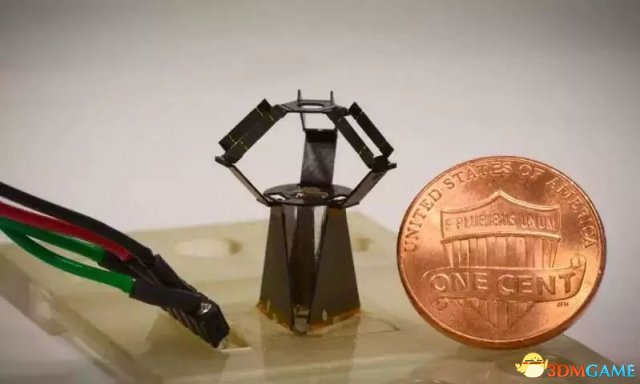
近日,一个迷你机器人火了,它是由哈佛大学Wyss生物创新工程研究所和John A. Paulson工程与应用科学学院(SEAS)的Robert Wood团队设计的 Delta 机器人,称为 milliDelta。
据称它是目前移动速度最快、精度最高的机器人,只比硬币大一点点。
先来个动图一睹它的真容吧!
该机器人尺寸为 15×15×20 毫米,重 430 毫克,但可以举起 1.3 克的重物。milliDelta 可以在 7 立方毫米的空间内,以 5 微米的精度运动,最高速度可达 0.45 米每秒,换句话说,milliDelta 每秒可以执行 75 次动作。
频率大概是酱紫的,晃的眼睛酸(75赫兹下的圆周运动)。
大多数机器手的肢体部分都包含有不止一个电机,这令机器手变得很重。而将机器人驱动电机置于底座,就可以解决这个问题,使机器手的运动更加快速和精确。
值得一提的是Delta 机器人的另一个设计,能保证原件在被放下时,其状态与被拿起时相同,无需进行进一步调整。
milliDelta 采用压电引擎驱动,碳纤维制成的承重结构和聚酰亚胺薄片制成的活动结构通过单片制造工艺和热压整合在一起,然后用激光切割成形。
由于Delta机器人精度高、速度快,被广泛应用于取放组装、机械加工、焊接和食品包装等多种工业流程中。

此外,一个更有想象力的提议是用 milliDelta 进行显微手术,比如,在眼科手术中,也可以将milliDelta安装在手术工具末端,用于抵消医务人员手部颤动。
目前,MilliDelta已经完成了它的第一个手术,参与了一个治疗人类首部震颤的设备测试。相关研究报告已经发表在《Science Robotics》。
该平台联合负责人及核心教员Wood表示,“缩放物理学告诉我们,缩小Delta机器人的尺寸将提高他们的速度和加速度,弹出式MEMS制造能够使用任何材料或材料组合,似乎是解决这个问题的理想方法。这种方法也使我们能够快速地完成许多迭代,最终制造出milliDelta。”
Millidelta的设计采用了复合材料层合板结构的嵌入式弯曲关节,其复杂性接近于大型Delta机器人的关节。
来自Wood团队的第一作者,Wyss研究所研究员Hayley McClintock表示,“在装配夹具的帮助下,这种层压板可以精确地折叠成毫米级的Delta机器人。milliDelta还利用压电致动器,使其能够以比现有Delta机器人高15至20倍的频率进行移动。”
1hz下的垂直运动
35hz下的垂直运动
研究人员将milliDelta进行显微手术和其他显微操作首先进行了测试,还将他们的机器人作为手部震颤消除装置进行了探索。
来自Wood团队的共同第一作者,SEAS博士后研究员Fatma Zeynep Temel博士说,“我们首先绘制了某个人拿着牙签尖端的路径,计算出这些路径,然后将它们馈入milliDelta机器人,这个机器人能够匹配和取消它们。”
1hz下的五角星运动轨迹
研究人员认为,专门的milliDelta机器人既可以添加到现有的机器人设备上,也可以开发为独立的设备,例如在研究和临床实验室中操作细胞的平台。
关于第一台用于制造巧克力的 delta 机器人,主要是服务于巧克力工厂,用于将果仁糖放入包装中。与关节中拥有舵机的普通机器人不同,delta机器人由一个中心基站控制。机械臂排列成三角形构造,每只手臂可以非常轻,不需要非常大的力就可以驱动。
发明人是通过无意间观察妻子织毛衣,从毛衣针获得启发,传统的方式是利用是液压引擎,但是因为功率较大,巧克力又轻,没有什么优势可言。
他从织毛衣的过程中获得灵感:可以让机器人拥有 3 个手臂,使得手臂能以 3 个自由度运动;比较重的引擎被放置在底座中,而不是运动部分。以上两个特征提供了难以置信的轻便性和速度,因此一直被沿用至今。

Wyss研究所创始人Donald Ingber博士如是说:“Wood团队的工作证明毫米级机器人的速度和控制得到了加强,为工业和医疗机器人开辟了一条全新的发展道路,这是现有技术无法实现的,这也是我们的仿生机器人技术平台引领未来的又一个例子。”
他还是HMS血管生物学Judah Folkman教授和波士顿儿童医院血管生物学项目的教授,以及SEAS生物工程学教授。

























玩家点评 (0人参与,0条评论)
热门评论
全部评论